| What's new in SPE SDK 3.00
|
|
New interface ISPEPhysicsState and ISPEConstraint and ISPEContact to access the new solver and building custom joints.
New APIs for Physics Filter in ISPERigidBody and ISPEWorld.
New Individual APIs for detect collisions for characters etc. in ISPEWorld.
ISPEShape::SetMassCenter() avaible now to move the center of mass after shape been initialized.
Old ISPERigidBody::SetPosition()/SetOrientation() changed to SetPositionMesh()/SetOrientationMesh() which are refer to mesh frame,
and current SetPosition()/SetOrientation() are refer to the center of mass(body frame). Set/GetTransform() also changed to Set/GetTransformMesh().
Remove the functions use single float as parameters like SetPosition(float x, float y, float z) in ISPERigidBody and ISPEParticle.
New APIs to access the sleep status of rigid body: SetSleeping(), GetSleeping(), SetSleepFactor(), GetSleepFactor().
New APIs to set or get AngularDamping of rigid body: Set/GetAngularDamping().
New APIs to filter collision for a single rigid body: AddCollisionException()/BeInCollisionException()/DeleteCollisionException, and Set/GetGroupId() for group filter.
Functions for Point and Vector transfer: BodyPoint()/WorldPoint()/BodyVector()/WorldVector() moved to ISPEPhysicsState form ISPERigidBody.
ISPERigidBody::AddWorldImpulse()/AddBodyTorque() changed to ISPERigidBody::ApplyWorldImpulse()/ApplyBodyTorque().
ISPERigidBody::GetContact had the new form, you must use ISPEContact interface.
Spring and friction in Joint not support any more, you must maintain them yourself.
ISPEWorld::Set/GetMaxSubStep() changed to Set/GetMaxStepPerUpdate().
ISPEWorld::DirectStep() avaible now to call single Step() directly.
ISPEWorld::GetBreakList() avaible now to get list of rigid bodies that need to break.
New APIs to config the precision and speed of new solver in ISPEWorld: SetSolverCacheFactor()/SetSolverPrecision().
ISPEWorld::Set/GetNumThreads() not avaible now in public SDK.
New APIs to clear the physics world: ISPEWorld::Clear(), and ISPEWorld::ClearGarbage() to release unused memory.
New tutorials in SDK: Physics and AI, CustomJoint.
|
|
Introduction :
|
|
|
Tutorials :
|
|
|
References :
|
|
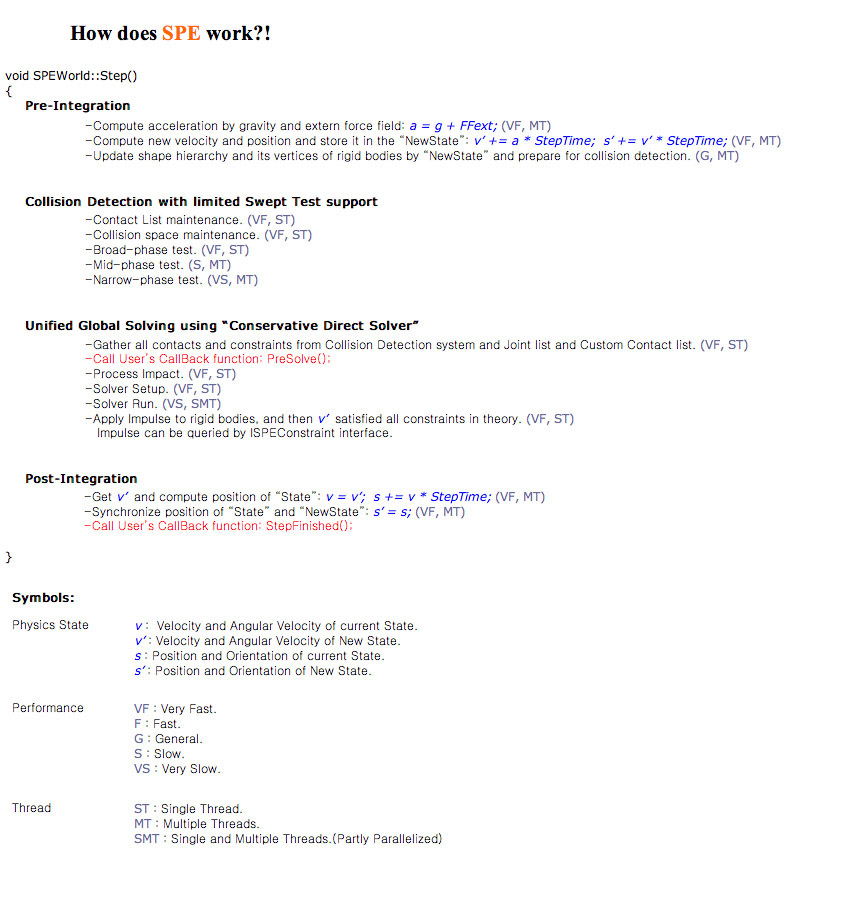
| How does SPE work?
|
|
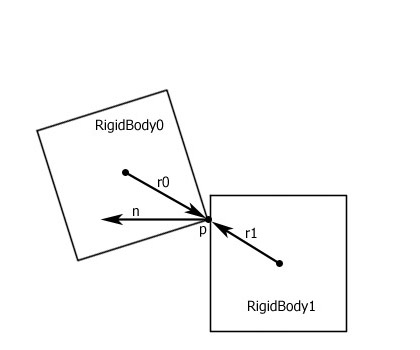
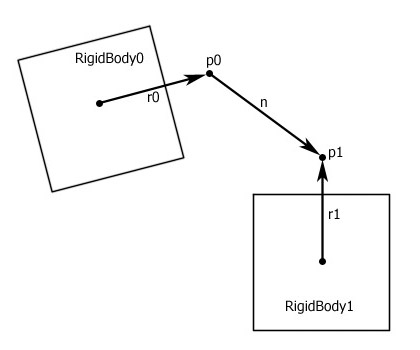
| Constraint in SPE
|
|
Introduction of SPEConstraintData.
|
|
|
| Get Start
|
|
Import the Library. Configure your IDE to make sure the compiler and linker can find "SPE.lib" and "SPE.h".
Include the header file of SPE, "SPE.h" is the only file you need to include.
#include "SPE.h"
Define some global variables.Ready for physics simulation.// Function to initialize a shape from D3DXMeshvoid InitShape(ISPEShape* pShape, ID3DXMesh* pMesh) { BYTE *pVB; void *pIB; pMesh->LockVertexBuffer(D3DLOCK_NOSYSLOCK, (void**)&pVB); pMesh->LockIndexBuffer (D3DLOCK_NOSYSLOCK, (void**)&pIB); if(pMesh->GetOptions() & D3DXMESH_32BIT) // 32BIT index { pShape->Initialize (pVB, pMesh->GetNumBytesPerVertex (), (int*)pIB, pMesh->GetNumFaces ()); } else // 16BIT index { pShape->Initialize (pVB, pMesh->GetNumBytesPerVertex (), (WORD*)pIB, pMesh->GetNumFaces ()); } pMesh->UnlockVertexBuffer (); pMesh->UnlockIndexBuffer (); } void InitApp() { D3DXLoadMeshFromX ("box.x", &pBoxMesh); // load a model from x file pWorld = CreateSPEWorld(); // create a instance of physics world pWorld->SetGravity (SPEVector(0, -9.8f, 0)); // set the gravity LPSPESHAPE pShape = pWorld->CreateShape(); // create a shape instance InitShape(pShape, pBoxMesh); // initialize the shape pBody = pWorld->AddRigidBody (pShape); // add a rigid body to SPEWorld with this shape pBody->SetPosition (SPEVector(0.0f, 2.0f, 0.0f)); // set position of rigid body pBody->SetVelocity (SPEVector(0.0f, 0.0f, -5.0f)); // set velocity pBody->SetAngularVelocity (SPEVector(0.0f, 25.0f, 0.0f)); pWorld->ReleaseShape(pShape); // release the shape // another way to add a rigid body is to use "Shape" which is a member of pWorld, it had // been created when the pWorld was created. e.g. // InitShape(pWorld->Shape, pBoxMesh); // pBody = pWorld->AddRigidBody (); // you needn't pass any parameter if you want to add a rigid body by "Shape" , and needn't release it // it can be Re-Initialize too.} Update the physics world.
void CALLBACK OnFrameMove(float fElapsedTime )
{
pWorld->Update(fElapsedTime);
}
Get physics result from engine.void CALLBACK OnFrameRender( IDirect3DDevice9* m_pd3dDevice ) { D3DXMATRIX matWorld; pBody->GetTransformMesh (&matWorld); // get the world matrix of a rigid body pd3dDevice->SetTransform (D3DTS_WORLD, &matWorld); pBoxMesh->DrawSubset (0); } void CALLBACK OnDestroyDevice( void* pUserContext ) { SAFE_RELEASE( pBoxMesh ); ReleaseSPEWorld( pWorld ); // release physics world} |
| Joint
|
void InitApp() { LPSPESHAPE pShape = pWorld->CreateShape(); // create a shape instance D3DXLoadMeshFromX ("cask.x", &pCaskMesh); // load a model from x file InitShape(pShape, pCaskMesh); // add 4 rigid bodies to the physics world using same shape for(int i=0; i<4; i++) { pBody[i]=pWorld->AddRigidBody (pShape); pBody[i]->SetPosition (SPEVector(0, (float)i+2, 0)); } pWorld->ReleaseShape(pShape); SPEJointDesc jd; // define a joint desc jd.Default(); // set to default jd.Body[0]=pBody[0]; // first body to be linked by the joint jd.Body[1]=pBody[1]; // second body to be linked by the joint jd.CreateByWorldAnchor=true; // create by world anchor jd.WorldAnchor=SPEVector(0, 2.5f, 0); // specify the world position of anchor pJoint[0]=pWorld->AddJoint(jd); // add joint to the physics world pBody[3]->SetBeStatic(true); jd.Default(); jd.Body[0]=pBody[3]; jd.Body[1]=pBody[2]; jd.CreateByWorldAnchor=false; // create by body anchor jd.BodyAnchor[0]=SPEVector(0,-0.5f,0); // specify the position in the first body's frame jd.BodyAnchor[1]=SPEVector(0,0,1); // specify the position in the second body's frame pJoint[1]=pWorld->AddJoint(jd); } |
| Break
|
SPEArray<LPSPERIGIDBODY> Bodies; // use an array to save dynamic increasing rigid bodies// function to create a SPEMesh from D3DXMeshvoid InitMesh(SPEMesh &speMesh, LPD3DXMESH pMesh) { DXVERTEX *dxvb; int *dxib; pMesh->LockVertexBuffer(D3DLOCK_NOSYSLOCK, (void**)&dxvb); pMesh->LockIndexBuffer (D3DLOCK_NOSYSLOCK, (void**)&dxib); int nBytes=pMesh->GetNumBytesPerVertex (); speMesh.Initialize ((BYTE*)dxvb, nBytes, (BYTE*)&dxvb[0].t, nBytes, dxib, pMesh->GetNumFaces ()); pMesh->UnlockVertexBuffer (); pMesh->UnlockIndexBuffer (); } void InitApp() { LPSPESHAPE pShape = pWorld->CreateShape(); // create a shape instance // add a normal rigid body D3DXLoadMeshFromX ("cask.x", &pBoxMesh); // load a model from x file InitShape(pShape, pBoxMesh); pbody=pWorld->AddRigidBody (pShape); pbody->SetPosition (SPEVector(-5, 3, 0)); pbody->SetVelocity (SPEVector(10,0,0)); pbody->UserData=pBoxMesh; // use UserData as flag for rendering. Bodies.push(pbody); // add a breakable rigid body D3DXMatrixScaling(&mat, 1.0f, 1.0f, 1.0f); LoadMesh(pd3dDevice, pMesh[3], L"media/bone.x", mat); // to make a breakable rigid body, shape initializing from SPEMesh is necessary! SPEMesh speMesh; InitMesh(speMesh, pMesh[3]); // create a SPEMesh first pShape->Initialize(speMesh); // Initialize a shape from SPEMesh pbody=pWorld->AddRigidBody (pShape); pbody->SetPosition (SPEVector(-1, 3, 0)); pbody->SetAngularVelocity (SPEVector(10,0,0)); pbody->SetBreakForce(30.0f); // positive value make the body be breakable pbody->UserData=0; // use UserData as flag for rendering Bodies.push(pbody); pWorld->ReleaseShape(pShape); D3DXCreateTextureFromFile(pd3dDevice, L"media/spehome.bmp", &spe); // texture for original surface D3DXCreateTextureFromFile(pd3dDevice, L"media/section.bmp", §ion); // texture for sections} // function to break a rigid body into piecesvoid CheckBreak() { for(int i=0; i<Bodies.size; i++) { if(Bodies[i]->WantBreak()) // if a force greater than "BreakForce" had just applied to body { SPEContactInfo ci; Bodies[i]->GetBreakContact(ci); // get the contact which make the body break srand(timeGetTime()); SPEVector n(rnd(1),rnd(1),rnd(1)); // generate a rand normal direction // create a plane by rand normal and contact info as a knife to carve the body SPEPlane pl(n, ci.Position); pWorld->Carve(Bodies[i], pl); // carve the body and the result is saved in ISPEWorld::Meshes LPSPERIGIDBODY pbody; for(int j=0; j<pWorld->Meshes.size; j++) { pWorld->Shape->Initialize(pWorld->Meshes[j]); // initialize shape from piece mesh if(pWorld->Shape->GetVolume()<0.0005f) continue; // ignore the too small pieces pbody=pWorld->AddRigidBody(); // add a rigid body to SPEWorld by ISPEWorld::Shape // if the volume is greater than 0.05f, then make it breakable too if(pWorld->Shape->GetVolume()>0.05f) { pbody->SetBreakForce(30.0f); } // compute states to make all pieces looks like a real part from the old body pbody->PatternState (Bodies[i]); pbody->UserData=0; // set the render flag Bodies.push(pbody); // add to body list } pWorld->DeleteRigidBody(Bodies[i]); // delete the old broken body from SPEWorld Bodies.del(i); // delete the pointer from local body list i--; } } } void CALLBACK OnFrameMove(float fElapsedTime) { pWorld->Update(fElapsedTime); CheckBreak(); // check break every frame} void CALLBACK OnFrameRender( IDirect3DDevice9* pd3dDevice) { D3DXMATRIX matWorld; for(int i=0; i<Bodies.size; i++) { Bodies[i]->GetTransform (&matWorld); pd3dDevice->SetTransform (D3DTS_WORLD, &matWorld); if(Bodies[i]->UserData) { LPD3DXMESH pMesh=(LPD3DXMESH)(Bodies[i]->UserData); pd3dDevice->SetTexture(0, spe); pMesh->DrawSubset (0); } else // render objects by SPEMesh { SPEMesh* pMesh=Bodies[i]->GetShape()->GetMesh(); // render the original surface pd3dDevice->SetTexture(0, spe); pd3dDevice->DrawPrimitiveUP(D3DPT_TRIANGLELIST, pMesh->GetNum(0), pMesh->GetData(0), sizeof(SPEVertex)); // render the section pd3dDevice->SetTexture(0, section); pd3dDevice->DrawPrimitiveUP(D3DPT_TRIANGLELIST, pMesh->GetNum(1), pMesh->GetData(1), sizeof(SPEVertex)); } } } |
| ContactQuery
|
LPSPECONTACT pContact; int num=pBody[1]->GetNumContacts(); for(int i=0; i<num; i++) { pContact=pBody[1]->GetContact(i); float sign = pBody[1]==pContact->GetRigidBody(0) ? 1.0f : -1.0f; // normal and impulse in Constraint is for the first rigid body int numConstraints=pContact->GetNumConstraints(); for(int j=0; j<numConstraints; j++) { LPSPECONSTRAINT pConstraint=pContact->GetConstraint(j); SPEVector position=pConstraint->GetPosition(); SPEVector normal=pConstraint->GetNormal()*sign; SPEVector impulse=pConstraint->GetImpulse()*sign; DrawLine(pd3dDevice, position, position+normal, 0); DrawLine(pd3dDevice, position, position+impulse*0.05f, 0xffffff00); } } |
| Fluid
|
LPSPEWORLD pWorld; LPSPEFLUID pFluid; void InitApp() { pFluid=pWorld->AddFluid(); // add a Fluid to SPEWorld pFluid->SetMaterial(SPE_WATER); // set material //pFluid->SetMaterial(SPE_SMOKE); pFluid->SetMeshGeneration(true); // generate surface mesh for rendering float step=0.08f; SPEVector velocity(0, 0, 0); for(float y=0.0f; y<1.0f; y+=step) { for(float x=0.0f; x<step*9.5f; x+=step) { for(float z=0.0f; z<step*9.5f; z+=step) { pFluid->AddParticle(SPEVector(x, y+1.0f, z), velocity); // add particle to Fluid } } } } void RenderFluid() { D3DXMatrixIdentity(&matWorld); // all the vertices of fluid mesh are in world frame pd3dDevice->SetTransform (D3DTS_WORLD, &matWorld); pd3dDevice->SetFVF(DXFVF); pd3dDevice->DrawPrimitiveUP(D3DPT_TRIANGLELIST,pFluid->GetMesh()->Triangle.size, &pFluid->GetMesh()->Triangle[0],sizeof(SPEVertex)); // to render Fluid as particles, use ISPEFluid::GetParticlePosition, and do not forget to turn mesh generation off.} |
| Physics Filter
|
|
There are 2 ways to disable collision detection.
You can only use group filter to disable solving.
|
| Collision Detection
|
|
1) Create rigid body first using ISPEWorld::CreateRigidBody():
LPSPERIGIDBODY pBody0, pBody1;
pBody0=pWorld->CreateRigidBody(pShape);
pBody1=pWorld->CreateRigidBody(pShape);
2) Specify the position and new position to the State and NewState for each rigid body:
pBody0->GetState()->SetPosition(pos);
pBody0->GetNewState()->SetPosition(npos);
pBody1->GetState()->SetPosition(pos);
pBody1->GetNewState()->SetPosition(npos);
3) Push the rigid bodies to an array and call DetectCollisions().
SPEArray<LPSPERIGIDBODY> list;
list.push(pBody0);
list.push(pBody1);
pWorld->DetectCollisions(list);
4) Then you can get the collision information by contact query interfaces of ISPERigidBody.
Note:
[1]You can also change the orientation on step 2);
[2]SPE do not generate a full swept volume to detect collisions, so if the distance from
position to new position is too long and make broad phase skiped, you may miss some collisions.
[3]Contact information is stored in a temporary list, you must use it before you call ISPEWorld::DetectCollisions() next time.
[4]Physics filter is also effective here.
|
| ISPEShape Reference
|
Applications use the methods of the ISPEShape interface to create collision shapes and ready for create rigid bodies.
struct ISPEShape { virtual SPERESULT Initialize(BYTE *pVertex, int StrideSize, int *pIndex, int NumTriangles) = 0; |
Create a shape from tri-mesh data.
Parameters
pVertex
[in] Pointer to vertex buffer.
StrideSize
[in] Stride of one vertex, in bytes.
pIndex
[in] Pointer to index buffer, index must be 32BIT.
NumTriangles
[in] Number of triangles.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
|
virtual SPERESULT Initialize(BYTE *pVertex, int StrideSize, WORD *pIndex, int NumTriangles) = 0; |
Create a shape from tri-mesh data.
Parameters
pVertex
[in] Pointer to vertex buffer.
StrideSize
[in] Stride of one vertex, in bytes.
pIndex
[in] Pointer to index buffer, index must be 16BIT.
NumTriangles
[in] Number of triangles.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
|
virtual SPERESULT InitializeForStatic(BYTE *pVertex, int StrideSize, int *pIndex, int NumTriangles) = 0; |
Create a shape from tri-mesh data for static rigid body.
Parameters
pVertex
[in] Pointer to vertex buffer.
StrideSize
[in] Stride of one vertex, in bytes.
pIndex
[in] Pointer to index buffer, index must be 32BIT.
NumTriangles
[in] Number of triangles.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
Shape Initializing by this function can only be static, you can not use SetBeStatic(false) to active it. This function is just a little faster than the general initializing.
|
virtual SPERESULT Initialize(BYTE *pVertex, int StrideSize, int NumVertices) = 0; |
Create a convex hull by giving vertices.
Parameters
pVertex
[in] Pointer to vertex buffer.
StrideSize
[in] Stride of one vertex, in bytes.
NumVertices
[in] Number of vertices.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
|
virtual SPERESULT Initialize(SPEMesh &speMesh) = 0; |
Create a shape from a SPEMesh object.
Parameters
speMesh
[in] reference of a SPEMesh object.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
|
virtual SPERESULT InitializeAsSphere(float r) = 0; |
Create a sphere shape.
Parameters
r
[in] radius of sphere.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
|
virtual SPERESULT InitializeAsCapsule(float length, float r) = 0; |
Create a capsule shape.
Parameters
length
[in] length of capsule.
r
[in] radius of capsule.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
The axis of capsule is align on Z, length must be greater than 2*r.
|
virtual float GetVolume() = 0; |
Get the volume of shape.
Parameters
Return
The volume of shape.
Remarks
The volume is computed while the shape be initialized.
|
virtual SPERESULT SetMassCenter(const SPEVector &cm) = 0; |
Set the center of mass of shape.
Parameters
cm
[in] center of mass.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
This function is only valid after initializing and before creating rigid body, if you try to change the center of mass using interface from the ISPERigidBody::GetShape(), it would failed.
|
virtual SPEVector GetMassCenter(void *pv=0) = 0; |
Get the mass center of shape.
Parameters
pv
[out] If pv is not null, mass center value will be copied to.
Return
The mass center of shape.
Remarks
The mass center is computed while the shape be initialized.
|
virtual SPEMesh* GetMesh() = 0; |
Get the pointer of SPEMesh contained in the shape.
Parameters
Return
The pointer of SPEMesh.
Remarks
If the shape is not initialize from SPEMesh, the return valume is 0.
|
virtual SPERESULT CloneTo(ISPEShape** ppIShape) = 0; |
Clone the shape instance to another interface.
Parameters
ppIShape
[out] Address of a pointer to an ISPEShape interface, representing the destination shape.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
An initialized shape must be released before get the new shape data.
|
protected: ISPEShape(){} virtual ~ISPEShape(){} }; |
| ISPEPhysicsState Reference
|
|
Applications use the methods of the ISPEPhysicsState interface to query of modify the physics state of rigid body.
struct ISPEPhysicsState
{
// Set or Get member of State for body frame
virtual void SetPosition(const SPEVector pos) = 0;
virtual SPEVector GetPosition() = 0;
virtual void SetOrientation(const SPEMatrix ort) = 0;
virtual SPEMatrix GetOrientation() = 0;
virtual void SetVelocity(const SPEVector vel) = 0;
virtual SPEVector GetVelocity() = 0;
virtual void SetAngularVelocity(const SPEVector& av) = 0;
virtual SPEVector GetAngularVelocity() = 0;
// Set or Get member of State for mesh frame
virtual void SetPositionMesh(const SPEVector pos) = 0;
virtual SPEVector GetPositionMesh() = 0;
virtual void SetOrientationMesh(const SPEMatrix ort) = 0;
virtual SPEMatrix GetOrientationMesh() = 0;
// Transform a point or a vector between body frame and world frame
virtual SPEVector PointBodyToWorld(const SPEVector &p) = 0;
virtual SPEVector PointWorldToBody(const SPEVector &p) = 0;
virtual SPEVector VectorBodyToWorld(const SPEVector &p) = 0;
virtual SPEVector VectorWorldToBody(const SPEVector &p) = 0;
// Get the velocity at a point in world frame
virtual SPEVector GetVelocityAtWorldPoint(const SPEVector &p) = 0;
protected:
ISPEPhysicsState(){}
virtual ~ISPEPhysicsState(){}
};
|
| ISPERigidBody Reference
|
Applications use the methods of the ISPERigidBody interface to manipulate and query rigid body.
struct ISPERigidBody { virtual void SetMass(float mass) = 0; |
Set the mass of rigid body.
Parameters
mass
[in] mass of rigid body.
Return
Remarks
The default mass of a rigid body is 1000 * ShapeVolume.
|
virtual float GetMass() = 0; |
Get the mass of rigid body.
Parameters
Return
The mass of rigid body.
Remarks
The default mass of a rigid body is 1000 * ShapeVolume.
|
virtual void SetDensity(float density=1000) = 0; |
Set the density of rigid body.
Parameters
density
[in] density of rigid body.
Return
Remarks
The default density of rigid body is 1000. New mass of rigid body would be density * ShapeVolume.
|
virtual float GetDensity() = 0; |
Get the density of rigid body.
Parameters
Return
The density of rigid body.
Remarks
The default density of rigid body is 1000.
|
virtual void SetInertia(const SPEMatrix &inertia) = 0; |
Set the inertia tensor.
Parameters
inertia
[in] inertia tensor.
Return
Remarks
The inertia tensor is computed automatically by system. Note that inertia would be restored while you call SetMass()/SetDensity().
|
virtual SPEMatrix GetInertia() = 0; |
Get the inertia tensor.
Parameters
Return
The inertia tensor of rigid body.
Remarks
The inertia tensor is computed automatically by system. Note that inertia would be restored while you call SetMass()/SetDensity().
|
virtual SPEMatrix GetWorldInertia() = 0; |
Get the inertia tensor in world frame by current orientation.
Parameters
Return
The inertia tensor of rigid body.
Remarks
The inertia tensor is computed automatically by system. Note that inertia would be restored while you call SetMass()/SetDensity().
|
virtual ISPEPhysicsState* GetState() = 0; |
Get the interface of "State" of rigid body.
Parameters
Return
interface of "State".
Remarks
|
virtual ISPEPhysicsState* GetNewState() = 0; |
Get the interface of "New State" of rigid body.
Parameters
Return
interface of "New State".
Remarks
|
virtual void SetPosition(SPEVector& pos) = 0; |
Set the position of rigid body.
Parameters
pos
[in] position.
Return
Remarks
The default position of rigid body is SPEVector(0,0,0).
|
virtual SPEVector GetPosition() = 0; |
Get the position of rigid body.
Parameters
Return
Position of rigid body.
Remarks
|
virtual void SetOrientation(SPEMatrix& ort) = 0; |
Set the Orientation of rigid body.
Parameters
ort
[in] Orientation.
Return
Remarks
The default Orientation of rigid body is SPEMatrix::Identity().
|
virtual SPEMatrix GetOrientation() = 0; |
Get the Orientation of rigid body.
Parameters
Return
orientation of rigid body.
Remarks
The default Orientation of rigid body is SPEMatrix::Identity().
|
virtual void SetVelocity(SPEVector& v) = 0; |
Set the velocity of rigid body.
Parameters
v
[in] velocity.
Return
Remarks
The default velocity of rigid body is SPEVector(0,0,0).
|
virtual SPEVector GetVelocity() = 0; |
Get the velocity of rigid body.
Parameters
Return
Remarks
The default velocity of rigid body is SPEVector(0,0,0).
|
virtual void SetAngularVelocity(SPEVector& av) = 0; |
Set the angular velocity of rigid body.
Parameters
av
[in] angular velocity.
Return
Remarks
The default angular velocity of rigid body is SPEVector(0,0,0).
|
virtual SPEVector GetAngularVelocity() = 0; |
Get the angular velocity of rigid body.
Parameters
Return
Remarks
The default angular velocity of rigid body is SPEVector(0,0,0).
|
virtual void SetPositionMesh(const SPEVector& pos) = 0; |
Set the position of rigid body for mesh frame.
Parameters
pos
[in] position.
Return
Remarks
The default position of rigid body is SPEVector(0,0,0), hence the default position for mesh frame is -MassCenter.
|
virtual SPEVector GetPositionMesh() = 0; |
Get the position of rigid body for mesh frame.
Parameters
Return
position.
Remarks
The default position of rigid body is SPEVector(0,0,0), hence the default position for mesh frame is -MassCenter.
|
virtual void SetOrientationMesh(const SPEMatrix& ort) = 0; |
Set the Orientation of rigid body for mesh frame.
Parameters
ort
[in] Orientation.
Return
Remarks
The default Orientation of rigid body is SPEMatrix::Identity(). Changing the orientation for mesh frame may also caused the position of body frame change.
|
virtual SPEMatrix GetOrientationMesh() = 0; |
Get the Orientation of rigid body.
Parameters
Return
orientation of rigid body.
Remarks
The default Orientation of rigid body is SPEMatrix::Identity().
|
virtual void SetTransformMesh(SPEMatrix& trans) = 0; |
Set the Transform of rigid body for mesh frame, include position and orientation.
Parameters
trans
[in] Transform.
Return
Remarks
The default Transform of rigid body is SPEMatrix::Identity(), hence the default transform matrix for mesh frame is SPEMatrix::Translate(-MassCenter);
|
virtual void SetTransformMesh(void* pmat) = 0; |
Set the Transform of rigid body using other data type, include position and orientation.
Parameters
pmat
[in] address of a matrix.
Return
Remarks
The default Transform of rigid body is SPEMatrix::Identity(), hence the default transform matrix for mesh frame is SPEMatrix::Translate(-MassCenter);
|
virtual SPEMatrix GetTransformMesh(void* pmat=0) = 0; |
Get the Transform of rigid body, include position and orientation.
Parameters
pmat
[out] address of a matrix or NULL.
Return
Remarks
If pamt is not 0, Transform data would copied to. The default Transform of rigid body is SPEMatrix::Identity(), hence the default transform matrix for mesh frame is SPEMatrix::Translate(-MassCenter);
|
virtual void SetBeStatic(bool bs) = 0; |
Set if the rigid body be static.
Parameters
bs
[in] bool.
Return
Remarks
If the rigid body had been set to be static, it would not move and the mass is infinite. The default is false.
|
virtual bool GetBeStatic() = 0; |
Get if the rigid body be static.
Parameters
Return
true if the rigid body be static, else return false.
Remarks
If the rigid body had been set to be static, it would not move and the mass is infinite. The default is false.
|
virtual SPERESULT SetSleeping(bool sleeping) = 0; |
Force to sleep or wake up the rigid body.
Parameters
sleeping
[in] (true)sleep or (false)wake up.
Return
Remarks
|
virtual bool GetSleeping() = 0; |
Get the state of sleeping of a rigid body.
Parameters
Return
true if is sleeping, else return false.
Remarks
|
virtual void SetSleepFactor(float factor) = 0; |
Set the factor of sleep threshold which would determine how fast a rigid body go to sleep.
Parameters
factor
[in] factor.
Return
Remarks
The default factor is 1.0f;
|
virtual float GetSleepFactor() = 0; |
Get the factor of sleep threshold which would determine how fast a rigid body go to sleep.
Parameters
Return
factor.
Remarks
The default factor is 1.0f;
|
virtual void SetDynamicGeneration(bool dg) = 0; |
Set if the rigid body would be controled by manual.
Parameters
dg
[in] bool.
Return
Remarks
If the rigid body had been set to generate dynamic, Velocity and AngularVelocity is generated while you call SetTransform or SetPosition or SetOrientation, making ragdoll interact with other bodies. The default is false.
|
virtual bool GetDynamicGeneration() = 0; |
Get if the rigid body would be controled by manual.
Parameters
Return
true if the rigid body had been set to generate dynamic, else return false.
Remarks
If the rigid body had been set to generate dynamic, Velocity and AngularVelocity is generated while you call SetTransform or SetPosition or SetOrientation, making ragdoll interact with other bodies. The default is false.
|
virtual void SetExternForceField(SPEVector &force) = 0; // this function can used for particles |
Set extern force field influence to rigid body.
Parameters
force
[in] a vector reprenting the force field.
Return
Remarks
This is a dedicate function design for particle simulation. The default is SPEVector(0,0,0).
|
virtual SPEVector GetExternForceField() = 0; |
Get extern force field influence to rigid body.
Parameters
Return
Extern force field.
Remarks
The default is SPEVector(0,0,0).
|
virtual void SetDamping(float damping) = 0; |
Set damping of rigid body.
Parameters
damping
[in] damping.
Return
Remarks
The default is 0.0f.
|
virtual float GetDamping() = 0; |
Get damping of rigid body.
Parameters
Return
damping of rigid body.
Remarks
The default is 0.0f.
|
virtual void SetAngularDamping(float angulardamping) = 0; |
Set angular damping of rigid body.
Parameters
angulardamping
[in] angular damping.
Return
Remarks
The default is 0.0f.
|
virtual float GetAngularDamping() = 0; |
Get angular damping of rigid body.
Parameters
Return
angular damping of rigid body.
Remarks
The default is 0.0f.
|
virtual void SetFriction(float friction) = 0; |
Set friction coefficient of rigid body.
Parameters
friction
[in] friction coefficient.
Return
Remarks
When two rigid bodies collide, the finally friction coefficient between two surfaces is: (body0.friction+body1.friction)/2 . The default is 0.5f.
|
virtual float GetFriction() = 0; |
Get friction coefficient of rigid body.
Parameters
Return
Friction coefficient of rigid body.
Remarks
When two rigid bodies collide, the finally friction coefficient between two surfaces is: (body0.friction+body1.friction)/2 . The default is 0.5f.
|
virtual void SetElasticity(float elasticity) = 0; |
Set elasticity coefficient of rigid body.
Parameters
elasticity
[in] elasticity coefficient.
Return
Remarks
When two rigid bodies collide, the finally elasticity coefficient between two surfaces is: body0.elasticity*body1.elasticity . The default is 0.1f.
|
virtual float GetElasticity() = 0; |
Get elasticity coefficient of rigid body.
Parameters
Return
Elasticity coefficient of rigid body.
Remarks
When two rigid bodies collide, the finally elasticity coefficient between two surfaces is: body0.elasticity*body1.elasticity . The default is 0.1f.
|
virtual void ApplyWorldImpulse(SPEVector &impulse, SPEVector &position) = 0; |
Apply a impulse to the rigid body.
Parameters
impulse
[in] a vector representing the impulse, include direction and scalar, in world frame.
position
[in] position where impulse to applied, in world frame.
Return
Remarks
Impulse would applied into the NewState.
|
virtual void ApplyBodyTorque(SPEVector &torque) = 0; |
Add a Torque to the rigid body.
Parameters
torque
[in] a vector representing the torque, include direction and scalar, in body frame.
Return
Remarks
Impulse would applied into the NewState.
|
virtual int GetNumContacts() = 0; |
Get number of the contacts of rigid body.
Parameters
Return
Number of the contacts of rigid body.
Remarks
|
virtual ISPEContact* GetContact(int index) = 0; |
Get index'th contact.
Parameters
index
[in] index.
Return
the index'th contact.
Remarks
|
virtual bool CastRay(SPEVector &RayPos, SPEVector &RayDir, SPECastRayInfo &Info) = 0; |
Test if a ray intersect this rigid body.
Parameters
RayPos
[in] Start position of the ray.
RayDir
[in] Direction of the ray.
Info
[out] Intersect information of this test.
Return
true if the ray intersect this rigid body, else return false.
Remarks
To find the nearest intersection in the whole world, use SPEWorld::CastRay(...).
|
virtual void AddCollisionException(ISPERigidBody *pIBody) = 0; |
Add a rigid body to collision exception list to avoid collision detection.
Parameters
pIBody
[in] interface of a rigid body.
Return
Remarks
|
virtual bool BeInCollisionException(ISPERigidBody *pIBody) = 0; |
Check if a rigid body is in the collision exception list.
Parameters
Return
true if in, else false.
Remarks
|
virtual void DeleteCollisionException(ISPERigidBody *pIBody=0) = 0; |
Delete a rigid body to collision exception list.
Parameters
pIBody
[in] interface of a rigid body. if pIBody==0, all rigid body in the list would be deleted.
Return
Remarks
|
virtual void SetGroupId(int id) = 0; |
Set the group Id of a rigid body.
Parameters
id
[in] Id.
Return
Remarks
Group Id is used for physics filter.
|
virtual int GetGroupId() = 0; |
Get the group Id of a rigid body.
Parameters
Return
Id.
Remarks
Group Id is used for physics filter.
|
virtual void SetBreakForce(float force) = 0; |
Set the tolerance force of rigid body.
Parameters
force
[in] tolerance force.
Return
Remarks
While a force greater than BreakForce had applied to the rigid body, WantBreak() would return true. Negative value means unbreakable. The default is -1.
|
virtual float GetBreakForce() = 0; |
Get the tolerance force of rigid body.
Parameters
Return
Tolerance force.
Remarks
While a force greater than BreakForce had applied to the rigid body, WantBreak() would return true. Negative value means unbreakable. The default is -1.
|
virtual bool WantBreak() = 0; |
Get the state whether a rigid body can break.
Parameters
Return
true if a force greater than BreakForce had applied to the rigid body, else return false.
Remarks
|
virtual void GetBreakContact(SPEContactInfo &Contact) = 0; |
Get the information of contact which break the rigid body.
Parameters
Contact
[out] Reference of a SPEContactInfo.
Return
Remarks
|
virtual void PatternState(ISPERigidBody* ibody) = 0; |
Set all the states of the child pieces patterned from parent body.
Parameters
ibody
[in] parent body.
Return
Remarks
A dedicated function to implement breakable rigid bodies. It computes and sets new position, orientation, velocity, angular velocity to make pieces looks like a real part from the parent body.
|
virtual ISPEShape* GetShape() = 0; |
Get the shape interface of rigid body.
Parameters
Return
Shape interface of rigid body.
Remarks
Shape in the rigid body had been locked and can not be initialized.
|
void* UserData; int iUserData; float fUserData; protected: ISPERigidBody() { UserData=0; iUserData=0; fUserData=0.0f; } virtual ~ISPERigidBody(){} }; |
| ISPEJoint Reference
|
Applications use the methods of the ISPEJoint interface to control joints.
struct ISPEJoint { virtual ISPERigidBody* GetBody(int index) = 0; |
Get one of rigid body linked by this joint.
Parameters
index
[in] Rigid body index, 0 or 1.
Return
Interface of the rigid body.
Remarks
|
virtual SPEVector GetWorldAnchor() = 0; |
Get the world anchor of joint.
Parameters
Return
World anchor of joint.
Remarks
|
virtual void SetBodyAnchor(int index, SPEVector &anchor) = 0; |
Change the body anchor of joint.
Parameters
index
[in] index of two bodies, 0 or 1.
anchor
[in] new position of body anchor, in body frame.
Return
Remarks
Body anchor had been determined when the joint been created, this function allow user to change position of anchor.
|
virtual SPEVector GetBodyAnchor(int index) = 0; |
Get the body anchor of joint.
Parameters
index
[in] index of two bodies, 0 or 1.
Return
Remarks
Body anchor had been determined when the joint been created.
|
virtual bool IsBroken() = 0; |
Get the state that whether the joint is broken.
Parameters
Return
true if the joint is broken, else return false.
Remarks
A joint been breakable only when the member of SPEJointDesc named BreakForce had been asigned a positive value when create the joint.
|
virtual ISPEContact* GetContact() = 0; |
Get the contact interface for this joint.
Parameters
Return
interface of contact.
Remarks
|
}; |
| ISPEConstraint Reference
|
Applications use the methods of the ISPEConstraint interface to get collision information or build custom joints.
struct ISPEConstraint { virtual SPERESULT SetData(const SPEConstraintData &data) = 0; |
Feed data to constraint.
Parameters
data
[in] data.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
If the length of n in data is less than 1.0e-6, the method would failed.
|
virtual void GetData(SPEConstraintData &data) = 0; |
Get data of this constraint.
Parameters
data
[out] data.
Return
Remarks
|
virtual void SetEnabled(bool enabled) = 0; |
Enable of disable a constraint.
Parameters
enabled
[in] value.
Return
Remarks
The default is true.
|
virtual bool GetEnabled() = 0; |
Get the state of the constraint.
Parameters
Return
true if enabled, else return false.
Remarks
The default is true.
|
virtual SPEVector GetPosition() = 0; |
Get the position of the constraint.
Parameters
Return
position.
Remarks
Only the constraint generated by collision detection had a valid position.
|
virtual SPEVector GetNormal() = 0; |
Get the normal of the constraint.
Parameters
Return
normal.
Remarks
The direction of normal is for the first rigid body of a contact pair, If you want to get the normal for the second rigid body, just reverse it(multply -1.0f).
The return value is equal to the SPEConstraintData.n.
|
virtual SPEVector GetImpulse() = 0; |
Get the Impulse work out by solver.
Parameters
Return
impulse.
Remarks
The direction of impulse is for the first rigid body of a contact pair, If you want to get the impulse for the second rigid body, just reverse it(multply -1.0f).
You can't get valid impulse in the CallBack function PreSolve() because the solver had not run.
|
protected: ISPEConstraint(){} virtual ~ISPEConstraint(){} }; |
| ISPEContact Reference
|
Applications use the methods of the ISPEContact interface to manage the constraints.
struct ISPEContact { virtual void SetRigidBody(ISPERigidBody* pIBody0, ISPERigidBody* pIBody1) = 0; |
Specify the rigid body of contact pair.
Parameters
pIBody0, pIBody1
[in] two rigid bodies.
Return
Remarks
If you had not specify the rigid bodies, you can not enable this contact.
|
virtual ISPERigidBody* GetRigidBody(int index) = 0; // index must be 0 or 1 |
Get the rigid body of contact pair.
Parameters
index
[in] index of two rigid body, must be 0 or 1.
Return
Remarks
|
virtual ISPEConstraint* AddConstraint() = 0; |
Add a constraint to contact.
Parameters
Return
interface of a constraint.
Remarks
You can also retrieve the interface by it's index.
|
virtual SPERESULT DeleteConstraint(ISPEConstraint* pIConstraint=0) = 0; |
Delete a constraint or all constraints from contact.
Parameters
pIConstraint
[in] interface of a constraint, it it's null, all constraints would be deleted.
Return
SPE_OK if pIConstraint is valid, else return SPE_FAILED.
Remarks
|
virtual SPERESULT SetEnabled(bool enabled) = 0; |
Enable or disable all constraints belong to the contact.
Parameters
enabled
[in] value.
Return
SPE_OK if succeed, else return SPE_FAILED.
Remarks
If you had not specify the rigid bodies, you can not enable this contact. The default is false.
|
virtual bool GetEnabled() = 0; |
Get the state of the contact.
Parameters
Return
true if enabled, else return false.
Remarks
The default is false.
|
virtual int GetNumConstraints() = 0; |
Get the numble of constraints.
Parameters
Return
numble of constraints.
Remarks
|
virtual ISPEConstraint* GetConstraint(int index) = 0; |
Get the constraint by index.
Parameters
Return
interface of constraint, if index is not valid, return 0.
Remarks
|
virtual ISPEConstraint* GetVirtualConstraint() = 0; |
Get the virtual constraint.
Parameters
Return
interface of constraint.
Remarks
Virtual constraint is generated by collision detection system, generally, it is the center of all contact point,
and it's normal is get from a contact point which had the deepest penetrate. Virtual constraint is used to process impact.
|
virtual SPECONTACTTYPE GetType() = 0; |
Get the type of contact.
Parameters
Return
type of contact.
Remarks
The type would be COLLISION, JOINT or CUSTOM.
|
virtual SPEVector GetSumImpulse(int index) = 0; // index must be 0 or 1 |
Get the sum of impulses of all constraint for index'th rigid body.
Parameters
Return
sum of impulses.
Remarks
|
virtual SPEVector GetSumTorque(int index) = 0; // index must be 0 or 1 |
Get the sum of torque of all constraint for index'th rigid body.
Parameters
Return
sum of torques.
Remarks
|
protected: ISPEContact(){} virtual ~ISPEContact(){} }; |
| ISPEParticle Reference
|
Applications use the methods of the ISPEParticle interface to access particles in Fluid.
struct ISPEParticle { virtual void SetPosition(const SPEVector& pos) = 0; |
Set the position of particle.
Parameters
pos
[in] position
Return
Remarks
|
virtual SPEVector GetPosition() = 0; |
Get the position of particle.
Parameters
Return
Position of particle.
Remarks
If pos is not 0, position data would copied to.
|
virtual void SetVelocity(const SPEVector& v) = 0; |
Set the velocity of particle.
Parameters
v
[in] velocity
Return
Remarks
|
virtual SPEVector GetVelocity() = 0; |
Get the velocity of particle.
Parameters
Return
Velocity of particle.
Remarks
|
protected: ISPEParticle(){} virtual ~ISPEParticle(){} }; |
| ISPEFluid Reference
|
Applications use the methods of the ISPEFluid interface to control the simulation of Fluid.
struct ISPEFluid { virtual void SetMaterial(SPEFLUIDMATERIAL material) = 0; |
Set the material of fluid.
Parameters
material
[in] material, SPE_WATER or SPE_SMOKE.
Return
Remarks
SPE hide any parameters of SPH algorithm to make the engine easy to use and to keep the engine be stable.
|
virtual ISPEParticle* AddParticle(const SPEVector &position) = 0; |
Add a particle with zero velocity to fluid.
Parameters
position
[in] position.
Return
Remarks
|
virtual ISPEParticle* AddParticle(const SPEVector &position, const SPEVector &velocity) = 0; |
Add a particle to fluid.
Parameters
position
[in] position.
velocity
[in] velocity.
Return
Remarks
|
virtual void DeleteParticle(ISPEParticle* pIParticle=0) = 0; |
Delete a particle or all particles from Fluid.
Parameters
pIParticle
[in] interface of a Fluid or NULL.
Return
Remarks
If pIParticle is not NULL, pIParticle would be deleted, otherwise all Particles in the Fluid would be deleted.
|
virtual int GetNumParticles() = 0; |
Get the number of particles in Fluid.
Parameters
Return
Number of particles.
Remarks
|
virtual void GetParticlePosition(void* pData, int StrideSize) = 0; |
Get the position of all particles in Fluid.
Parameters
pData
[in] address of a buffer to store positions.
StrideSize
[in] stride of buffer, in bytes.
Return
Remarks
|
virtual void GetParticleVelocity(void* pData, int StrideSize) = 0; |
Get the velocity of all particles in Fluid.
Parameters
pData
[in] address of a buffer to store positions.
StrideSize
[in] stride of buffer, in bytes.
Return
Remarks
|
virtual void SetMeshGeneration(bool mg) = 0; |
Set if to generate surface mesh of Fluid.
Parameters
mg
[in] bool.
Return
Remarks
The reason SPE does not provide a function like GenerateMesh() is that the system only generate mesh at proper time.
|
virtual bool GetMeshGeneration() = 0; |
Get if to generate surface mesh of Fluid.
Parameters
Return
true if the system generate mesh, else return false.
Remarks
The reason SPE does not provide a function like GenerateMesh() is that the system only generate mesh at proper time.
|
virtual SPEMesh* GetMesh() = 0; |
Get the surface mesh of Fluid.
Parameters
Return
Pointer of surface mesh.
Remarks
|
protected: ISPEFluid(){} virtual ~ISPEFluid(){} }; |
| ISPEWorld Reference
|
Applications use the methods of the ISPEWorld interface to control physics world.
struct ISPEWorld { virtual void SetGravity(const SPEVector &g) = 0; |
Set the gravity of the physics world.
Parameters
g
[in] gravity.
Return
Remarks
The default is SPEVector(0, 0, -9.8f).
|
virtual SPEVector GetGravity() = 0; |
Get the gravity of the physics world.
Parameters
Return
gravity.
Remarks
The default is SPEVector(0, 0, -9.8f).
|
virtual void SetStepTime(float time=0.01f) = 0; |
Set the step time to do physics simulation.
Parameters
time
[in] step time.
Return
Remarks
SPE use fixed time step to do physics simulation, small step time means more time to compute. The default is 0.01f.
|
virtual float GetStepTime() = 0; |
Get the step time to do physics simulation.
Parameters
Return
step time.
Remarks
SPE use fixed time step to do physics simulation, small step time means more time would be take to compute. The default is 0.01f.
|
virtual void SetMaxStepPerUpdate(int sub=2) = 0; // 2 is the default |
Set the number of max step in a update.
Parameters
sub
[in] number of max step.
Return
Remarks
SPE use fixed time step to do physics simulation, when the elapsed time is greater than step time, SPE would do physics-computation more than once. The default is 2.
|
virtual int GetMaxStepPerUpdate() = 0; |
Get the number of max step in a update.
Parameters
Return
number of max step.
Remarks
SPE use fixed time step to do physics simulation, when the elapsed time is greater than step time, SPE would do physics-computation more than once. The default is 2.
|
virtual int Update(float dt) = 0; |
Update the physics world, including integration, collision dection and collision resolve.
Parameters
dt
[in] elapsed time.
Return
number of step ran during this update.
Remarks
|
virtual void DirectStep() = 0; |
Update the physics world with a single step.
Parameters
Return
Remarks
|
virtual void SetSolverCacheFactor(float factor=0.2f) = 0; // 0.2 is the default |
Set the percentage of cached results to be used as initialization value for solver.
Parameters
factor
[in] percentage, must be in [0.0, 1.0].
Return
Remarks
The default is 0.2(20%). Cache data is useful only when the solver precision is low and no large-scale impulse/force change in the simulation.
|
virtual float GetSolverCacheFactor() = 0; |
Get the percentage of cached results to be used as initialization value for solver.
Parameters
Return
percentage
Remarks
The default is 0.2(20%). Cache data is useful only when the solver precision is low and no large-scale impulse/force change in the simulation.
|
virtual void SetSolverPrecision(int precision=2) = 0; // 2 is the default |
Set the Precision level of solver.
Parameters
precision
[in] precision level, must be greater than 0.
Return
Remarks
The default is 2.
|
virtual int GetSolverPrecision() = 0; |
Get the Precision level of solver.
Parameters
Return
precision
Remarks
The default is 2.
|
virtual void SetCallBackPreSolve(SPECallBackFunc pFunc, void *pParam) = 0; |
Set the call back function which would be called before solver run.
Parameters
pFunc
[in] a pointer to a function.
pParam
[in] parameter of your function.
Return
Remarks
Call back function must defined like this: void* pFunc(void *pParam){...}. To disable call back function, set pFunc to 0.
|
virtual void SetCallBackStepFinished(SPECallBackFunc pFunc, void *pParam) = 0; |
Set the call back function which would be called after a step is finished.
Parameters
pFunc
[in] a pointer to a function.
pParam
[in] parameter of your function.
Return
Remarks
Call back function must defined like this: void* pFunc(void *pParam){...}. To disable call back function, set pFunc to 0.
|
virtual void SetNumThreads(int n) = 0; |
Set the number of threads to be use for each phase of physics computation. For Multi-Threads Library only.
Parameters
n
[in] number of threads.
Return
Remarks
The default is 1, means multi-thread is disabled. Do not try to use a number larger than the cores of CPU.
|
virtual int GetNumThreads() = 0; |
Get the number of threads using for each phase of physics computation. For Multi-Threads Library only.
Parameters
Return
number of threads.
Remarks
The default is 1, means multi-thread is disabled.
|
virtual ISPEShape* CreateShape() = 0; |
Create a shape instance.
Parameters
Return
Interface of a shape instance.
Remarks
SPEWorld::Shape is available as soon as the SPEWorld been created.
|
virtual void ReleaseShape(ISPEShape *pIShape) = 0; |
Release a shape instance.
Parameters
pIShape
[in] interface of a shape instance.
Return
Remarks
|
virtual ISPERigidBody* AddRigidBody(ISPEShape *pIShape=0) = 0; |
Add a rigid body to the physics world by a shape.
Parameters
pIShape
[in] interface of a shape instance or NULL.
Return
Interface of a rigid body.
Remarks
If pIShape==0, system would use SPEWorld::Shape to add a rigid body.
|
virtual void DeleteRigidBody(ISPERigidBody *pIBody=0) = 0; |
Delete a rigid body or delete all rigid bodies in the physics world.
Parameters
pIBody
[in] interface of a rigid body or NULL.
Return
Remarks
If pIBody is not NULL, pIBody would be deleted, otherwise all rigid bodies in the physics world would be deleted.
|
virtual ISPEFluid* AddFluid() = 0; |
Add a Fluid instance to the physics world.
Parameters
Return
Interface of a Fluid.
Remarks
|
virtual void DeleteFluid(ISPEFluid* pIFluid=0) = 0; |
Delete a Fluid or delete all Fluids in the physics world.
Parameters
pIFluid
[in] interface of a Fluid or NULL.
Return
Remarks
If pIFluid is not NULL, pIFluid would be deleted, otherwise all Fluids in the physics world would be deleted.
|
virtual ISPEJoint* AddJoint(SPEJointDesc& joint) = 0; |
Add a joint to the physics world by a joint desc.
Parameters
joint
[in] reference of a SPEJointDesc structure.
Return
Interface of a joint.
Remarks
|
virtual void DeleteJoint(ISPEJoint* pIJoint=0) = 0; |
Delete a joint or delete all joints in the physics world.
Parameters
pIJoint
[in] interface of a joint or NULL.
Return
Remarks
If pIJoint is not NULL, pIJoint would be deleted, otherwise all joints in the physics world would be deleted.
|
virtual ISPEContact* AddCustomContact() = 0; |
Add a custom contact to the physics world.
Parameters
Return
Interface of a contact.
Remarks
|
virtual SPERESULT DeleteCustomContact(ISPEContact* pIContact=0) = 0; |
Delete a custom contact or delete all custom contacts in the physics world.
Parameters
pIContact
[in] interface of a contact or NULL.
Return
Remarks
If pIContact is not NULL, pIContact would be deleted, otherwise all custom contact in the physics world would be deleted.
|
virtual void Clear() = 0; // clear all above stuff |
Delete all rigid bodies, fluids, joints, custom contacts in the physics world.
Parameters
Return
Remarks
|
virtual void ClearGarbage() = 0; // release all unused memory |
Release all unused memory allocated by SPE.
Parameters
Return
Remarks
|
virtual ISPERigidBody* CreateRigidBody(ISPEShape* pIShape=0) = 0; // if pIShape==0, member "Shape" is used |
Create a rigid body but not add to the list for simulation.
Parameters
pIShape
[in] interface of a shape instance or NULL.
Return
Interface of a rigid body.
Remarks
If pIShape==0, system would use SPEWorld::Shape to create a rigid body.
|
virtual SPERESULT ReleaseRigidBody(ISPERigidBody *pIBody) = 0; |
Release a rigid body.
Parameters
pIBody
[in] interface of a rigid body.
Return
SPE_OK if the method succeeds, else return SPE_FAILED.
Remarks
Only the interface returned by ISPEWorld::CreateRigidBody can be released.
|
virtual void DetectCollisions(SPEArray &RigidBodyList) = 0;
|
Detect collisions for a set of rigid bodies.
Parameters
RigidBodyList
[in] a set of rigid bodies.
Return
Remarks
For more information, see tutorial section in this document.
|
virtual void AddGroupPhysicsFlag(int id0, int id1, SPEGROUPPHYSICSFLAG flag) = 0;
|
Add a flag to physics world for physics filter.
Parameters
id0
[in] the first group id.
id0
[in] the second group id.
flag
[in] physics filter flag.
Return
Remarks
|
virtual SPEGROUPPHYSICSFLAG GetGroupPhysicsFlag(int id0, int id1) = 0;
|
Query the flag for a pair of group.
Parameters
id0
[in] the first group id.
id0
[in] the second group id.
Return
physics filter flag.
Remarks
If no matched pair is found, return SPE_PHYSICS_FULL.
|
virtual void DeleteGroupPhysicsFlag(int id0, int id1) = 0;
|
Delete a flag for a pair of group.
Parameters
id0
[in] the first group id.
id0
[in] the second group id.
Return
Remarks
|
virtual int GetNumGroupPhysicsFlags() = 0;
|
Get the number of flags in physics world.
Parameters
Return
number of flags.
Remarks
|
virtual void ClearGroupPhysicsFlag() = 0;
|
Delete all flags.
Parameters
Return
Remarks
|
virtual int GetBreakList() = 0;
|
Get the list of rigid bodies that need to break.
Parameters
Return
size of list.
Remarks
list is stored in the ISPEWorld::List.
|
virtual void Carve(ISPERigidBody* ibody, SPEPlane &knife) = 0;
|
Carve a rigid body by a plane.
Parameters
ibody
[in] interface of a rigid body to be carved.
knife
[in] a plane representing a knife.
Return
Remarks
The result is a list of SPEMesh, which stored in the SPEWorld::Meshes.
|
virtual void Carve(ISPERigidBody* ibody, SPEArray &knives) = 0;
|
Carve a rigid body by a collection of planes.
Parameters
ibody
[in] interface of a rigid body to be carved.
knives
[in] a collection of planes.
Return
Remarks
The result is a list of SPEMesh, which stored in the SPEWorld::Meshes.
|
virtual bool CastRay(SPEVector &RayPos, SPEVector &RayDir, SPECastRayInfo &Info) = 0; // find the nearest intersection
|
Cast a ray to find the nearest intersection.
Parameters
RayPos
[in] start position of the ray.
RayDir
[in] direction of the ray.
Info
[out] Intersect information of this test.
Return
true if the ray hits some thing, else return false.
Remarks
To test if a ray hits an appointed body, use SPERigidBody::CastRay(...).
|
ISPEShape* Shape;
|
A shape interface to bring some conveniences while using SPE
Parameters
Return
Remarks
|
SPEArray<SPEMesh> Meshes;
|
A list of SPEMesh to store the result of Carve(...).
Parameters
Return
Remarks
|
SPEArray<ISPERigidBody*> List;
|
A list of rigid bodies to store the result of some functions.
Parameters
Return
Remarks
|
protected:
ISPEWorld(){}
virtual ~ISPEWorld(){}
};
|
|


